
An industrial mobile robot (IMR) is a new definition for the world of mobile robotics. An IMR is a combination of a robotic arm and a mobile platform. The mobile platform may be an autonomous mobile robot (AMR) or an automatic guided vehicle (AGV). The role of the mobile platform is to maneuver the robotic arm between operational waypoints where the robotic arm can pickup or put down items.
This area of robotics is also known as “mobile manipulation” or as “mobile manipulators”.
AMRs and AGVs have been covered by a variety of worldwide standards that cover their safe operation and risk assessment. However, with the addition of an onboard robotic arm, there was a gap in standards coverage.
In 2020, the Robotics Industry of America (RIA) published a new standard that covers the safe design, commissioning and operation of IMRs. This new IMR standard is known as RIA/ANSI R15.08. The team that developed R15.08 consists of experts in both the B56.5 AGV standards and the R15.06 industrial robot standard, as well as members of ANSI, Canadian Standards Association, and members involved in the work of the International Organization for Standards (ISO) Technical Committee (TC) 299, Robotics.
Part 1 of R15.08 specifies the safety requirements for suppliers of IMRs. Part 2 describes requirements for integrators who are designing, installing, and integrating IMRs. Part 3 will define safety standards for end users of IMRs. Part 2 and Part 3 will be published as they are completed following the publication of Part 1.
Use cases for IMRs
Industrial mobile robots have a wide set of use cases. The technology supporting the operation of IMRs is still emerging, as it requires corroborative robot arms and machine vision for registration and guidance.
Warehouse and logistics presented some of the earliest viable use cases for IMRs. This includes workflow that enables an IMR to move through a warehouse and pick items from the inventory shelving fill customer orders.
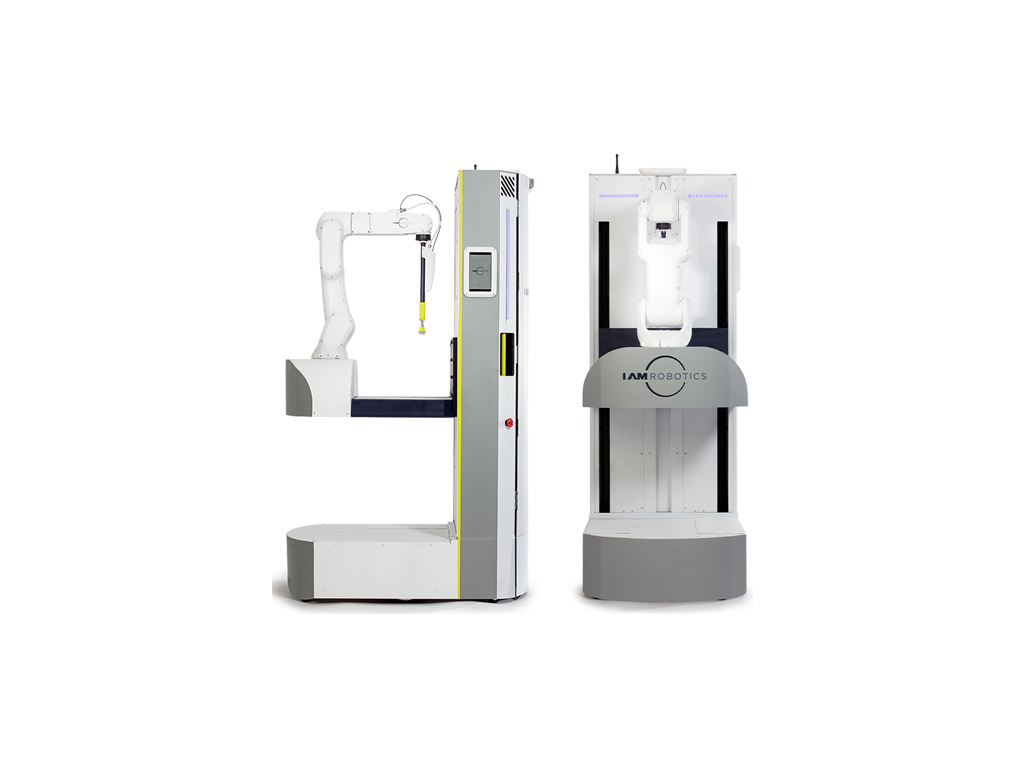
The IAM Robotics Swift robot is an example of an IMR. | Credit: IAM Robotics
IAM Robotics is one of the early innovators of industrial mobile robots with the introduction of their Swift robot. Swift is able to maneuver autonomously through a warehouse and use the vision guided robot arm to pick inventory items from warehouse shelves.

The Boston Dynamics Stretch robot unloads boxes from a tractor trailer on the loading dock. | Credit: Boston Dynamics
Boston Dynamics is another innovator of industrial mobile robots with the release of the Stretch IMR. Stretch uses its onboard mounted robot arm with a vacuum gripper to locate and unload boxes from a trailer parked at a loading dock. Stretch picks each box and drops it onto a gravity conveyor to moves the boxes out of the trailer. Stretch “digs” its way into the trailer until all of the boxes are removed.
Mobile palletizing/depalletizing
Mobile palletizing is another viable application for industrial mobile robots. Conceptually, this might include an IMR working together with a second AMR that holds an empty pallet. The two robots work in tandem as the IMR moves to inventory locations where it picks a box and creates a unit load pallet on the second AMR. This operation is also known as robot-to-goods workflow.
IMRs might also be employed for cross docking operations in a distribution center where the IMRs break down and reassemble unit loads for redistribution in outgoing logistics operations.









Tell Us What You Think!
You must be logged in to post a comment.