
Ottonomy’s Ottobots are able to transition from indoor and outdoor environments seamlessly. | Source: Ottonomy.IO
Pradyot Korupol, the CTO and co-founder of Ottonomy.IO, introduced high information navigation mapping for autonomous mobile robots (AMRs) at the NVIDIA GTC 2022 conference. According to Korupol, high information mapping has several advantages over traditional HD maps or mapless navigation.
Typically, AMRs use HD maps or mapless navigation to navigate the world. HD maps create a 3D digital twin of the environment. They can provide up to centimeter level accuracy, but they require high amounts of memory and energy to maintain. They also need to be constantly updated with whatever changes happen in the environment.
Mapless navigation requires a lot less computational power. This method uses cameras to detect traffic signs, lane markings and other vehicles, and adjusts to those in real time. This navigation method, however, heavily relies on GPS data, and requires large amounts of training for the robot’s predictions to be accurate.
“A lot of the requirements for our robots are not satisfied by the existing approaches, which requires us to do something different,” Korupol said.
Ottonomoy creates mobile delivery robots, called Ottobots, that operate in crowded, indoor and outdoor environments. The company was looking for a navigation solution that could be quickly implemented in a wide variety of environments, didn’t rely on GPS and was safe and accurate enough to handle dynamic environments, like airports.
High information navigation mapping strikes a balance between learning based and traditional methods of navigation. During the process, the robot will use information from camera and LiDAR sensors to create noise free maps (or maps that remove dynamic obstacles like people and vehicles).
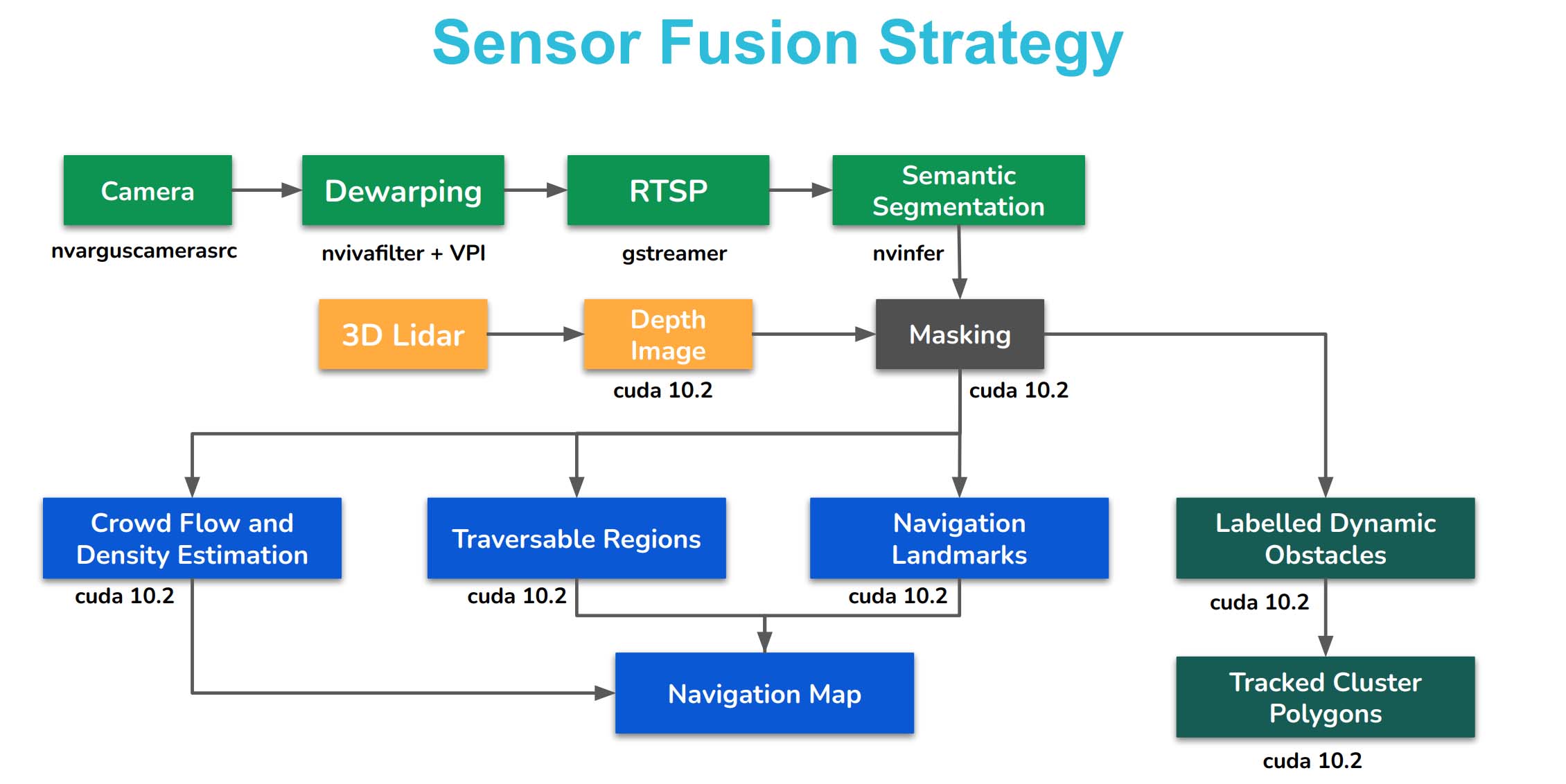
Ottonomy’s fusion strategy. | Source: Ottonomy.IO
A key aspect of the high information mapping process is the low compute, real-time sensor fusion method it uses. After combining information from cameras and LiDAR sensors, it creates a map of only the most crucial information, like street signs or boarding gates. It then organizes its map navigable areas and non-navigable areas.
“With a strong track record in autonomous driving technologies, our team has been able to translate principles of vehicle autonomy to near-term practical use cases for consumer environments,” Korupol said. “Leveraging high information maps as an input to our contextual navigation engine, Ottonomy.IO has the most robust navigation suite running in live conditions for both indoor and outdoor navigation for restaurants, retail spaces and airports.”
According to Korupol, high information maps only take up around 40% of the size of an HD map for the same mapped area, and are able to be built in just a day. HD maps, according to Korupol, usually take a few days to complete.
Editor’s note: Korupol’s entire talk can be found online here.









Tell Us What You Think!
You must be logged in to post a comment.